
沈陽自動化所微型機器人研究取得新進展
多刺激響應超疏水微型機器人驅動與控制
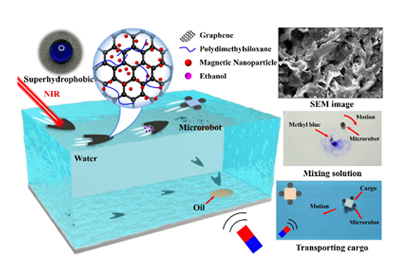
超疏水微型機器人可以在外界刺激下在水面上高效游動,圍繞這一現象科學家們展開了諸多研究,探索它的這一特性在諸多領域的應用前景,例如細胞操作,凈化水源等。然而,目前大部分對于超疏水微型機器人的研究都是圍繞單一刺激的驅動模式,使得超疏水微型機器人的運動和功能在復雜的水環境中受到了限制。
針對這一問題,中國科學院沈陽自動化研究所微納米課題組科研團隊開展了創新性研究,利用模板輔助法研發了多刺激響應超疏水微型機器人,其中超疏水的作用減少了水對微型機器人的阻礙。該微型機器人內部具有感知紅外光和磁場的單元,可以儲存化學試劑,使得它可以在光場、磁場等(即多場驅動)的控制下在水面快速游動。基于微型機器人的多刺激響應特性,在多場聯合控制下,微型機器人實現了協同配合操作。相關研究以Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications為題發表于工程技術一區Top期刊ACS Nano(IF:18.027)。
在該研究中,科研人員對微型機器人的穩定性和環境適應性進行了評估,結果表明,機器人在水面上可以實現預編程的軌跡運動,尤其是在化學試劑的作用和磁場的驅動下實現了不同軌跡的運動。科研人員進一步探索了在多場驅動下,實現多個機器人運動控制的可能性。結果表明,在光場和磁場作用下,多個機器人實現了協同配合操作,可以夾取大于自身尺寸較多的結構塊。隨著制備工藝的提升,微型機器人的尺寸有望進一步縮小,在細胞操作,生物組織構建等領域具有應用前景。
多刺激響應超疏水微型機器人相互配合夾取結構

客戶服務電話:
027-87018711
 掃描二維碼關注我們
掃描二維碼關注我們
聯系電話:李經理 13720126958 陳經理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術開發區關東街道湯遜湖北路36號武漢理工大科技園新能源研發基地2棟08層801
版權所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1