
 252024-07
252024-07機器人創新工坊科教融匯研討會成功舉辦
機器人創新工坊科教融匯研討會成功舉辦推動教育與科技深度融合2024年7月23日,機器人創新工坊科教融匯研討會在武漢理工大學科技園星火數字科創中心順利召開。本次研討會是在國家機器人創新中心、中國科學院沈陽自動化研究所指導下,由機器人創新工坊、武漢艾克特科技有限公司主辦,數字制造湖北省重點實驗室、機器人與智能制造湖北省工程研究中心協辦。旨在探討如何更好地將科學教育與科技創新相融合,為培養新一代具備創新
查看詳情 > 042024-06
042024-06活動通知:“機器人創新工坊”定于2024年7月21日-27日舉辦2024年機器人創新工坊“科教融匯”研討會暨“機器人系統底層控制與開發”高級研修班
關于舉辦2024年機器人創新工坊“科教融匯”研討會暨“機器人系統底層控制與開發”高級研修班的報名通知各高校及有關單位:“機器人創新工坊”是以專家資源及科研成果作為依托,校企聯合打造集技術研發、科研創新、技術推廣、成果轉化、人才培養等職能于一體的新型科創綜合體,結合校企雙方科研資源、政府資源、產業資源等方面的優勢,開展“產學研用”全方位合作,形成科研反哺教學、科研應用社會、科研服務國家的良性機制,提
查看詳情 > 232023-11
232023-11【喜報】祝賀于海斌研究員當選中國工程院院士
昨日中國科學院、中國工程院分別公布了2023年中國科學院、中國工程院院士增選當選院士名單。中國科學院沈陽自動化研究所于海斌研究員當選中國工程院院士。于海斌,中國科學院沈陽分院院長、博士生導師,機器人學國家重點實驗室主任。兼任中國自動化學會副理事長、全國工業過程測量控制和自動化標準化技術委員會主任委員,國際自動化學會會士。長期從事工業自動化與控制系統的研究,研發了高實時高可靠工業控制網絡與復雜工業控
查看詳情 >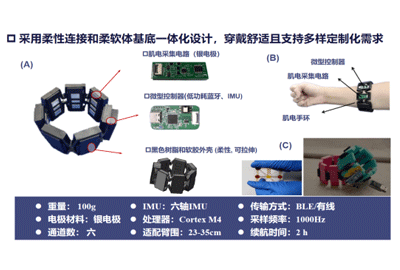 172023-11
172023-11肌電交互康復機器人系列產品研發取得新進展
人機交互機器人正在從獨立進入人機共融時代。為適應復雜場景下的應用需求,新型人機交互方式急需拓展。智能肌電交互系統是基于python語言實現UI交互界面、信號采集和處理、機器人控制的一體化平臺構建,方便使用機器學習方法進行二次開發,為人工智能、機器人等相關專業的基礎理論和實際應用的方面人才的培養提供助力。肌電手環或成為新一代人機交互接口,通過采集人體皮膚表面的微弱的生理電信號,實現對意圖指令的解碼。
查看詳情 >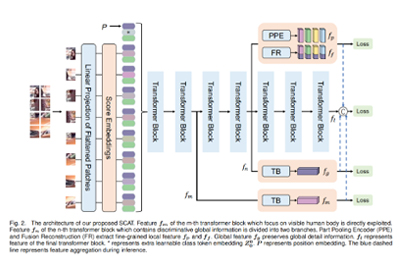 212023-08
212023-08沈陽自動化所在行人重識別領域研究取得新進展
基于Transformer注意力機制的遮擋行人重識別算法框架近日,中國科學院沈陽自動化研究所機器人視覺研究組在遮擋行人重識別領域取得新進展,提出了一種遮擋行人重識別算法。該研究成果在線發表于工業信息領域國際期刊IEEETransactionsonIndustrialInformatics(中國科學院一區Top類,IF:12.3)。 行人重識別指通過非重疊攝像頭檢索同一個行人目標,是行人檢測和行人
查看詳情 >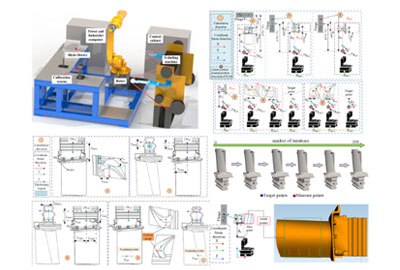 132023-06
132023-06沈陽自動化所在復雜曲面機器人自動化磨拋加工領域取得新進展
基于六點定位原理的航空發動機葉片坐標系自動標定方法近日,中國科學院沈陽自動化研究所在復雜曲面機器人自動化磨拋加工領域取得新進展,提出了一種基于六點定位原理的葉片坐標系自動標定方法,實現了航空發動機葉片磨拋加工過程中動態工件坐標系的自動標定。該研究成果于近期在線發表在計算機/制造領域期刊RoboticsandComputer-IntegratedManufacturing。 作為航空裝備的核心,航
查看詳情 >
客戶服務電話:
027-87018711
 掃描二維碼關注我們
掃描二維碼關注我們
聯系電話:李經理 13720126958 陳經理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術開發區關東街道湯遜湖北路36號武漢理工大科技園新能源研發基地2棟08層801
版權所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1